Acțiune:



Cum de a construi un Robot Arduino 4WD pentru începători
Mașinile cu telecomandă sunt distractive, sigur, dar auto-conducere mașinile robotizate sunt chiar mai distractive. În acest tutorial, vom construi un robot cu patru roți care să conducă și să evite obstacolele. Am cumpărat acest kit complet de 4WD de la AliExpress, dar ați putea cumpăra cu ușurință majoritatea acestor componente dintr-un magazin de electronice și l-ați pus împreună.
Vă recomandăm să citiți toate instrucțiunile înainte de a începe, deoarece acest lucru va face anumite lucruri clare, care ar putea fi confuze pentru prima dată prin. De asemenea, acest lucru ar putea părea ca un proiect foarte lung și avansat datorită lungimii instrucțiunilor, dar de fapt este destul de simplă. Nu este nevoie să fiți intimidați - acesta este un proiect la nivel de începător pe care îl puteți obține cu rezultate satisfăcătoare, apoi construiți pe măsură ce aflați mai multe. Nu-ți place acest stil de robot? Iată mai multe roboți Arduino 8 Roboți Arduino pe care îi puteți construi pentru mai puțin de 125 dolari 8 Roboți Arduino pe care îi puteți construi pentru mai puțin de 125 USD Arduino poate face multe, dar știți că poate crea roboți cu drepturi depline? De asemenea, destul de ieftin! Citiți mai multe pe care le puteți construi cu ușurință în loc.
Iată ce avem, după ce am luat totul din ambalaj:

Pentru a începe, vom atașa motoarele și podul H (cardul care alimentează motoarele) la partea inferioară a șasiului. Mai întâi, atașați cele patru brațe metalice (sunt dreptunghiulare, blocuri metalice forate) la fiecare motor folosind două șuruburi lungi și două piulițe.

Va trebui să vă asigurați că sunt atașate corect, deci verificați imaginea de mai jos pentru a vă asigura că partea blocului cu două găuri forate va fi în jos. Rețineți că firele de pe fiecare motor se îndreaptă spre centrul șasiului.

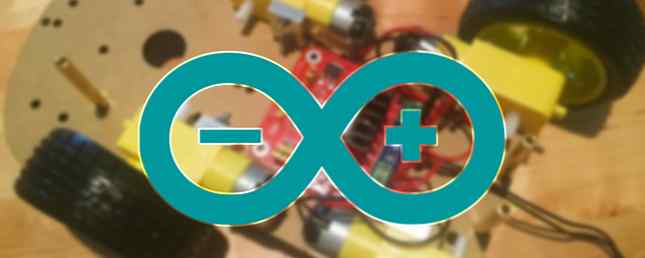
Acum, fiecare motor poate fi atașat la șasiu prin utilizarea a două șuruburi scurte în partea inferioară a fiecărui suport metalic. Iată o vedere a fundului șasiului astfel încât să puteți vedea unde trebuie să fie șuruburile:

Următorul pas este de a asigura podul H (care este placa roșie, în kit-ul meu) la șasiu. Poate doriți să așteptați până când toate firele sunt atașate la podul H înainte de a face acest lucru, dar depinde de dvs. (am considerat că este mai ușor). O notă rapidă: la kit-ul meu lipsea un număr de dispozitive de fixare, așa că am folosit bandă electrică pentru a asigura podul. Totuși, puteți vedea aici unde ar fi dispărut șuruburile și piulițele:

Acum, când podul H a fost atașat, puteți începe cablarea sursei de alimentare. Deoarece suportul pentru șase baterii AA este dotat cu un adaptor DC, va trebui fie să tăiați capătul (ceea ce am făcut-o), fie să rulați cablurile jumperii la bateriile.

Indiferent de modul în care vă decideți să faceți acest lucru, veți rula firul pozitiv în portul etichetat “VMS” și firul negativ la cel etichetat “GND” pe pod. Înșurubați dispozitivele de fixare și asigurați-vă că sunt siguri. Apoi, veți conecta firele motorului. Pe ambele părți, există un set de două porturi; unul este etichetat “MOTORA” si celalalt “MOTORB.” Ambii firele roșii pe fiecare parte vor intra în portul verde central, iar ambele fire negre vor intra în cea mai îndepărtată. Această imagine ar trebui să facă mai clară:

Am descoperit că a trebuit să-mi scot o parte din carcasă de pe firul motorului pentru ca asta să funcționeze. Acum, când aveți motoarele și sursa de alimentare cu energie electrică, glisați roțile pe arborii motorului și atașați cele patru arbori de cupru în locațiile prezentate în imaginea de mai jos (fiecare arbore de cupru are nevoie de un bolț mic). Acest robot începe să se formeze!

Acum, puneți o parte din șasiu deoparte și luați-o pe cealaltă care va sta pe partea de sus. Următorul pas este să atașați din nou Arduino, a trebuit să folosesc banda electrică, dar ar trebui să vă puteți asigura mai bine cu unele șuruburi și piulițe.

Următoarea etapă necesită micro servo, crosspiece negru, suport servo (care constă din trei bucăți de plastic negru) și niște șuruburi mici. Utilizați unul din șuruburile ascuțite mai mari din kit pentru a atașa elementul transversal negru la micro servo:

Apoi, rotiți servo-ul cu capul în jos în inelul din plastic negru al suportului. Asigurați-vă că firele care ies din servo sunt îndreptate în aceeași direcție cu cea mai lungă parte a suportului (din nou, vezi imaginea de mai jos) și utilizați patru șuruburi mici pentru a fixa bara transversală (există patru găuri în suport care aliniați cu orificiile de pe bara transversală).

Iată cum arată după ce este atașat:

În cele din urmă, luați celelalte două bucăți ale suportului servo și fixați-le pe servo (există caneluri în piesele laterale care se potrivesc cu clema de plastic a servomotorului).

Acum că suportul servo este complet, acesta poate fi montat pe șasiu.

Iată unde merg șuruburile:

E timpul să dăm robotului niște ochi. Atașați senzorul cu ultrasunete la suportul servo folosind două cravate de zip.

Dacă lucrați din același kit ca mine, ați primit un scut de senzor Arduino. Nu o vom folosi în această construcție, dar poți să o pui pe partea de sus a UNO acum dacă vrei (după cum am în imaginea de mai jos). Doar aliniați știfturile de pe partea inferioară a ecranului cu porturile I / O de pe Arduino și apăsați în jos pentru a le conecta. Nu aveți nevoie de el în acest moment, dar scuturile pot veni la îndemână Top 4 Arduino Shields Pentru a vă supraviețui Proiectele Top 4 Shields Arduino Pentru a vă supraviețui proiectelor Ați cumpărat un kit de pornire Arduino, ați urmat toate elementele de bază ghiduri, dar acum ați lovit un obstacol - aveți nevoie de mai multe biți și bobs pentru a realiza visul dvs. de electronice. Din fericire, dacă ai ... Citește mai mult .

Indiferent dacă conectați un scut senzor sau nu, veți avea nevoie acum de patru fire pentru a conecta senzorul ultrasonic la Arduino. Există patru știfturi pe senzor, VCC, GND, TRIG și ECHO. Conectați VCC la pinul 5V de pe arduino, GND la GND, și TRIG și ECHO la pinii I / O 12 și 13.
Acum, apucați partea inferioară a șasiului și conectați șase cabluri jumperi la pinii I / O ai podului H (sunt marcate ENA, IN1, IN2, IN3, IN4 și ENB). Luați notă de firele de culoare care sunt conectate la porturile pe care va trebui să le cunoașteți mai târziu.

Acum este momentul să începeți să puneți chestia asta împreună. Luați partea superioară a șasiului și puneți-o pe arborele de cupru conectat la partea inferioară și trageți firele atașate la puntea H prin orificiul din centrul șasiului. Conectați cele șase fire la porturile I / O după cum urmează:
- ENA la portul I / O 11
- ENB la portul I / O 10
- A1 la portul I / O 5
- A2 la portul I / O 6
- B1 la portul I / O 4
- B2 la portul I / O 3

Acum, utilizați patru șuruburi scurte pentru a fixa partea superioară a șasiului pe arborii de cupru. Poziționați suportul pentru șase baterii AA pe partea superioară a șasiului (înșurubați-l dacă puteți), atașați suportul pentru celule de 9V la Arduino și acest bot este gata să rock!

Ei bine, aproape gata să stârnească. Încă nu are destulă personalitate.

Vom merge acolo. Acum, să-i dați un creier. Să facem niște programări.
Primul lucru pe care îl vom face este să verificăm dacă podul și motoarele sunt conectate corect. Iată o schiță rapidă care va spune botului să conducă înainte o jumătate de secundă, să conducă înapoi timp de o jumătate de secundă, apoi să se întoarcă la stânga și la dreapta:
Este o mulțime de cod pentru un test simplu, dar definirea tuturor acestor funcții face mai ușor să optimizați mai târziu. (Mulțumesc lui Billwaa pentru postarea pe blog pe care o folosește pentru a defini aceste funcții.) Dacă sa întâmplat ceva, verificați toate conexiunile și că firele sunt conectate la pinii corecți. Dacă totul a funcționat, este timpul să treceți la testul senzorului. Pentru a utiliza senzorul cu ultrasunete, veți dori să descărcați biblioteca NewPing și apoi să o utilizați Sketch> Include Biblioteca> Adăugați Biblioteca Zip ... pentru a încărca biblioteca.

Asigurați-vă că vedeți instrucțiunea include în partea superioară a schiței; dacă nu, lovit Schiță> Includeți Biblioteca> NewPing. Odată ce ați făcut acest lucru, încărcați următoarea schiță:
Încărcați schița și deschideți monitorul serial utilizând Instrumente> Monitor serial. Ar trebui să vedeți o succesiune rapidă de actualizare a numerelor. Țineți mâna în fața senzorului și vedeți dacă numărul se schimbă. Deplasați-vă mâna și în afară și ar trebui să măsurați cât de departe este mâna de la senzor.

Dacă totul a funcționat corect, este timpul să puneți totul împreună și să lăsați acest lucru să funcționeze! Iată codul pentru robot acum. Dupa cum se poate spune, aceasta este in esenta cele doua schite de testare puse impreuna cu o declaratie aditionala if pentru a controla comportamentul robotului. Am dat un comportament foarte simplu de evitare a obstacolelor: dacă detectează ceva la mai puțin de patru centimetri depărtare, va face backup, va întoarce la stânga și va începe să se miște din nou. Iată un videoclip al botului în acțiune.
Dă robotului tău o viață
Odată ce ați realizat acest comportament corect, puteți adăuga un comportament mai complex; rotiți robotul alternativ între rotirea stânga și dreapta sau alegeți aleatoriu; sună un buzzer dacă se apropie de ceva; doar întoarceți, în loc de a face backup; esti cu adevarat limitat doar de imaginatia ta. Ai putea folosi aproape orice in trusa de pornire Arduino Ce e in kitul tau Arduino Starter? [Arduino Beginners] Ce este în setul dvs. de pornire Arduino? [Arduino Beginners] În fața unei cutii pline de componente electronice, este ușor să fii coplesit. Iată un ghid pentru exact ce veți găsi în kit. Citiți mai multe pentru a adăuga mai multe funcționalități. Veți observa, de asemenea, că nu am codificat nimic pentru servo încă: puteți face robotul dvs. de fapt “ochi” mișcați înainte și înapoi. probabil folosindu-le pentru a căuta o cale în loc de a face backup doar ori de câte ori găsește un obstacol direct în față.
Spuneți-ne dacă decideți să construiți acest robot sau altul și spuneți-ne cum decideți să-i personalizați comportamentul sau aspectul. Dacă aveți întrebări legate de acest robot, postați-le în comentariile de mai jos și văd dacă vă pot ajuta!
Explorați mai multe despre: Arduino, Robotica.